Магистранты Инженерной школы Дальневосточного федерального университета (ДВФУ) научили промышленного робота управлять математическим маятником и распознавать команды человека. Программное обеспечение, созданное в среде для проектирования MATLAB/Simulink, принесло студентам победу в международном конкурсе Simulink Student Challenge-2017. Команде ДВФУ первой в мире удалось выиграть в двух конкурсах подряд от компании-разработчика MathWorks.
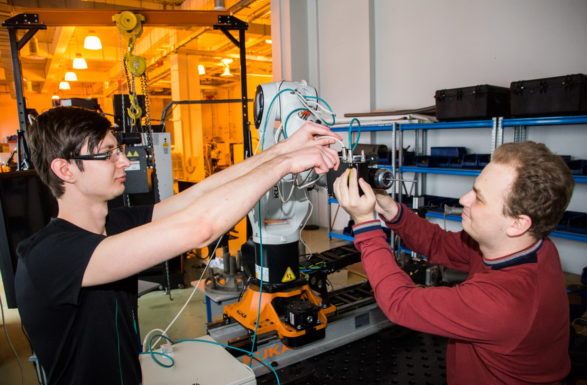
Всего в конкурсе приняли участие 25 команд со всего мира. По мнению жюри — разработчиков MathWorks — российские студенты проявили наиболее высокую креативность и уровень владения инструментами системного моделирования. Магистранты ДВФУ научили серийного промышленного робота видеть команды человека-оператора и чувствовать силы, возникающие в точке подвеса маятника, размещенного на манипуляторе. В разработке студенты использовали принципы прогнозирующего управления, аналитику искусственных нейронный сетей, технологии компьютерного зрения, вычислительные возможностей MATLAB/Simulink.

Итоги работы студентов можно посмотреть в представленном видеоролике «Industrial Robot Control Using MATLAB and Simulink»
Ученые разрабатывают экзоскелет, который управляется силой мысли
Очень легкий и портативный ручной экзоскелет может помочь людям с физическими недостатками в повседневной жизни. Швейцарские инженеры из Федеральной политехнической школы Лозанны смогли обойтись без вживления электродов под кожу.
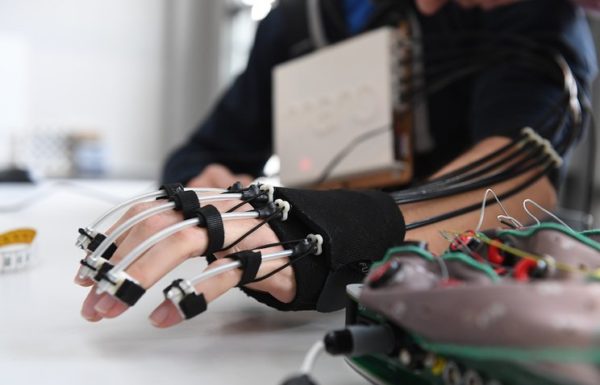
Металлические кабели действуют как мягкие сухожилия. Они расположены вдоль задней стороны каждого пальца и крепятся к ним с помощью липучек, оставляя ладонь свободной. В устройство входят двигатели, которые могут нажимать и тянуть за разные кабели, сгибая пальцы.
Экзоскелет адаптируется по дизайну, так что интерфейс управления может быть выбран в соответствии с необходимостью пациента пациента. Интерфейс управления может быть выбран из огромного множества систем: от наблюдения за движением глаз для полностью парализованных, до голосовых интерфейсов на основе смартфона, вплоть до считывания мозговой активности с помощью гарнитуры.
Ученые решили провести контроль над экзоскелетом при помощи мозговой активности через гарнитуру ЭЭГ, которая измеряет мозговые волны пользователей, когда они использовали экзоскелет. Они обнаружили, что ручные движения, вызванные устройством, вызывают мозговые паттерны, характерные для здоровых движений рук. Но они также обнаружили, что спровоцированные экзоскелетом движения рук в сочетании с пользовательским интерфейсом «мозг-машина» приводят к особым паттернам мозга, которые могут фактически облегчить управление устройством.
Часть мозга, контролирующая движение тела, называется моторной корой, которая разделена на левую и правую стороны. Правая моторная кора в основном активна во время контроля левой руки, и наоборот. Когда испытуемых просили активно думать о перемещении экзоскелета, часть мозга, которая обычно думает об управлении противоположной рукой, также была задействована.
Источник: actu.epfl.ch